
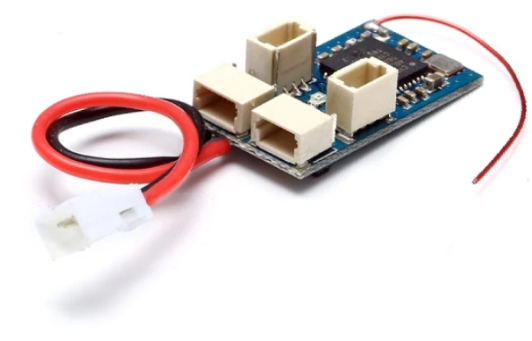
To take our Carbon Fiber Dizzy Space plane to the next level, we wanted to utilize a multichannel receiver. We discovered a 2.4G 4CH micro low voltage DSM2 DSMX compatible receiver offered by Banggood.com. This receiver fits that requirement. However how to bind this receiver to your transmitter, initialize it (arming it) and hook it up appears to cause a bit of confusion to the purchaser because of its uniqueness. So, we thought we would explore this technology, and explain how to easily do all these things before continuing with the next version of the Dizzy Space. So, let’s get started……
Here is a list of things you will need:

2. (2) linear micro servos. We went with these

3. (2) JST Angle Connectors,1.25MM 3-Pin Female Connector Plugs with Wire assemblies. We used these.

4. (2) 3-Pin SH1.0mm JST Connector Plugs with Wire Assemblies. We used these.

5. A lipo battery to power things. We used this new 150ma lipo from Amazon.
6. A DSM2 / DSMX compatible transmitter. We will be using a Taranis transmitter with Hobbyking DSM2 / DSMX compatible module.

Step 1: Binding
Getting this 2.4G 4CH Micro Low Voltage DSM2 DSMX Compatible Receiver to bind to your transmitter is simple. However, the documentation, at the time of writing, on the Banggood site is wrong on how to do this. Banggood references plugging in a bind plug to the micro receiver before applying power as part of the bind process. There is no bind plug and this is not how to bind this micro receiver.
To get the receiver to bind follow these 3 steps:
- Plug the battery into the micro receiver.
- Once powered up, the red LED in the center of the micro receiver will light up and begin to slowly blink.

You need to wait until the micro receiver light begins to blink rapidly. This indicates that the receiver is now in bind mode.
- Press the bind button on your transmitter. In our case, we push the bind button on our module for a second to get it into bind mode as well.

Once you do this, the red light on the micro receiver will stop blinking and become sold red indicating that the micro receiver is now bound to the transmitter. You can power down the receiver.
The next time you go to power up the 2.4G 4CH Micro Low Voltage DSM2 DSMX Compatible Receiver, just make sure your transmitter is already turned on before you power up your micro receiver. The micro receiver will immediately connect. Otherwise, if you wait too long, the micro receiver could enter bind mode again.
We have a video showing what the micro receiver does.
Step 2: Connecting a brushed motor to 2.4G 4CH Micro Low Voltage DSM2 DSMX Compatible Receiver
Connecting a brushed motor to this 2.4G 4 channel low voltage micro receiver is also simple. You need to soldier your motor wires to these pads on the underside of the micro receiver board:

Step 3: Initializing (Arming) the Micro Receiver
We have read about many users not being able to initialize (arm) this 2.4G 4CH Micro Low Voltage DSM2 DSMX Compatible Receiver after binding it. We experienced the same issue as well. There were several users who suggested adjusting the trim down or changing the timing for that channel. This did not solve our arming issue (as it had not with many other users).
What we discovered is that, in our situation, the micro receiver would not arm, not because of the trim setting, but because of the channel order our transmitter was configured for! Many of our other receivers are configured this way, with this channel order:

Channel 1: Aileron (or rudder)
Channel 2: Elevator
Channel 3: Throttle
However, this 2.4G 4 channel low voltage micro receiver is expecting this channel order:

Channel 1: Throttle
Channel 2: Aileron (or rudder)
Channel 3: Elevator
Once we switched this order in our transmitter (on the Taranis transmitter this is done using the Mixes function) The micro receiver initialized (armed) every time by moving the throttle stick to the maximum position and back to zero after power up.
Step 4: Connecting Servos to the Micro Receiver
Connecting servos to this 2.4G 4 channel low voltage micro receiver is probably the most challenging part of trying to utilize it for several reasons.
The first, is the connectors the micro receiver board utilizes. The on-board connector for each channel is a SH 1.0mm pin spaced JST plug.

“Typical” micro servo connectors use the industry standard JST 1.25mm pin spaced plug. So, most servos connectors will not work. To deal with this, we purchased two different styles of plugs. One from Banggood with the 1.0mm spacing to plug into the receiver (Banggood was the only vendor we could find these without a super long lead time) and another from Amazon with the industry standard 1.25mm spacing plug.


The idea was to create adapters to use with our servos so that we did not have to cut the connectors off the servos themselves. This is how it was done:

We plugged the adapter into the micro receiver and into the servo and powered up the board. Surprisingly, as many others have reported, it did not work! The servos did not respond.
The reason for this has to do with the pin outputs assigned to each connector. Unfortunately, they did not follow the industry standard for this either. The ground and signal leads are reversed! To make the adapter work you must reverse the ground and signal leads as shown here:

The actual pin assignment for each connector is this way:

Once this was done, everything worked perfectly. Here is a video of everything in action:
We hope this article has helped you get our micro receiver going. Stay tuned for the Carbon Fiber Dizzy Space plane upgrade!